
 产品:99
产品:99
 联系我们
联系我们

程序等待指令
1.指令与功能
通常情况下,RAPID 程序的自动运行是一个连续的过程,系统在当前的指令执行完后,将自动执行下一指令。但是,为了协调机器人运动,有时需要暂停程序的执行过程,以等待系统其他条件的满足,这就需要使用程序等待指令。
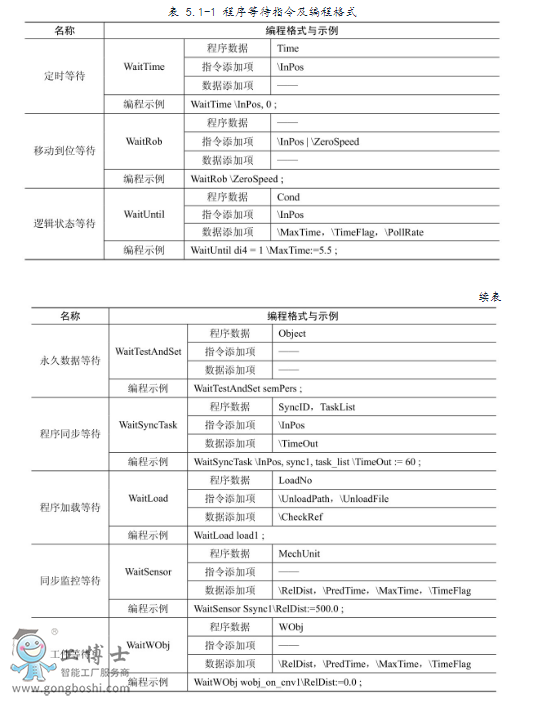
RAPID 程序等待的方式较多,除了可通过第 4.2 节所述的 I/O 读写等待指令,利用 I/O 信号来控制程序的执行外,还可通过定时、定位完成、***数据状态等方式来控制程序的执行过程,相关指令的名称、编程格式见表 5.1-1,编程要求和示例如下。
2.定时等待与移动到位等待
定时等待指令 WaitTime 和移动到位等待指令 WaitRob 是 RAPID 程序***常用和***基本的程序等待指令,指令编程要求分别如下。
① 定时等待。定时等待指令 WaitTime 可直接通过程序暂停时间的设定,来控制程序的执行过程,指令的编程格式及指令添加项、程序数据的要求如下。
Wait Time [\In Pos, ] Time ;
\InPos:移动到位,数据类型为 switch。不使用添加项时,系统执行指令时,将立即开始暂停计时。使用添加项后,需要在机器人、外部轴移动到位,且完全停止后才开始暂停计时;如暂停时间 Time 设定 0,指令功能与下述的到位等待指令 WaitRob \InPos 相同。
Time:暂停时间,数据类型为 num,单位为 s;设定值精度 0.001s,***大值无限制。
定时等待指令 Wait Time 的编程示例如下。
Move J p1, v1000, z30, tool1 ;
Wait Time \In Pos, 0 ; // 程序暂停,等待机器人到位
Set DO do1, 1 ;
Wait Time 0.5 ; // 程序暂停 0.5s
……
② 移动到位等待。移动到位等待指令 WaitRob 可通过对机器人、外部轴的到位区间或移动速度判别,来控制程序的执行过程,指令的编程格式及指令添加项的要求如下。
WaitRob [\InPos] | [\ZeroSpeed] ;
\In Pos或\Zero Speed:到位判别条件,数据类型 switch,两者必须且只能选择其一。选择\In Pos,系统以机器人、外部轴到达停止点规定的到位区间,作为暂停结束的条件;选择\ Zero Speed,系统以机器人、外部轴移动速度为 0,作为暂停结束的条件。
移动到位等待指令 WaitRob 的编程示例如下。
Move J p1, v1000, fine\Inpos:=inpos20, tool1 ;
WaitRob \InPos ; // 等待到达到位区间
Move J p2, v1000, fine, tool1 ;
WaitRob \ZeroSpeed ; // 等待移动速度为 0
……
3.逻辑状态等待
逻辑状态等待指令 Wait Until 可通过对系统逻辑状态的判别来控制程序的执行过程,指令的编程格式及指令添加项的要求如下。
Wait Until [\In Pos,] Cond [\Max Time] [\Time Flag] [\Poll Rate] ;
\InPos:移动到位,数据类型 switch。不使用添加项时,系统执行指令时,只需要判断逻辑条件;使用添加项后,需要增加机器人、外部轴移动到位的附加判别条件。
Cond:逻辑判断条件,数据类型 bool,可以使用逻辑表达式。
\MaxTime:***长等待时间,数据类型 num,单位为 s。不使用本添加项时,系统必须等待逻辑条件满足,才能继续执行后续指令;使用本添加项时,如逻辑条件在\Max Time 规定的时间内未满足条件,则进行如下处理:
① 未定义添加项\Time Flag 时,系统将发出等待超时报警(ERR_WAIT_MAXTIME),并停止;
② 定义添加项\Time Flag 时,则将\Time Flag 指定的等待超时标志置为「TURE」状态,系统可继续执行后续指令。
\TimeFlag:等待超时标志,数据类型为 bool。增加本添加项时,如指定的条件在\Max Time 规定的时间内仍未满足,则该程序数据将为「TURE」状态,系统可继续执行后续指令。
\PollRate:检测周期,数据类型为 num,单位为 s,***小设定 0.04s。添加项用来设定逻辑判断条件的状态更新周期,不使用本添加项时,系统默认的检测周期为 0.1s。
逻辑状态等待指令 Wait Until 的编程示例如下。
Wait Until \Inpos, di4 = 1 ; // 等待到位及 di4 信号 ON
Wait Until di1=1 AND di2=1 \Max Time:=5 ; // 等待 di1、di2 信号 ON,5s 后报警
……
VAR bool tmout ; // 定义超时标记
Wait Until di1=1 \Max Time:= 5 \Time Flag:= tmout ; // 等待 di1 信号 ON,5s 后继续
IF tmout THEN // 检查超时标记
Set DO do1, 1 ;
ELSE
Set DO do1, 0;
ENDIF
4.***数据等待
***数据 PERS(persistent)是可定义初始值并能保存***后结果的数据,它可通过模块的数据声明指令定义,但不能在主程序、子程序中定义,有关内容可参见第 2.3 节。
***数据等待指令 Wait Test And Set 可通过逻辑状态型(bool)***数据的状态,来控制程序的执行过程,指令的编程格式与程序数据要求如下。
Wait Test And Set Object ;
Object:***数据 PERS,数据类型 bool。指令用于不同任务控制时,Object 必须定义为全局***数据(global data,参见第 2.3 节)。
***数据等待指令 Wait Test And Set 具有如下功能。
① 如指令执行时,***数据的状态为 TRUE,则程序暂停,直至其成为 FALSE;随后,将***数据的状态设置为 TRUE。
② 如指令执行时,***数据的状态为 FALSE,则将其设置为 TRUE,并继续后续指令。
***数据等待指令 Wait Test And Set 的编程示例如下。
MODULE mainmodu (SYSMODULE) // 主模块
PERS bool sem Pers := FALSE ; // 定义***数据
……
ENDMODULE
!****************************************************
PROC doit() // 程序模块
……
Wait Test And Set sem Pers ; // 等待 sem Pers 状态 FALSE
……
***数据等待指令 Wait Test And Set 的功能,实际上也可通过逻辑状态等待指令 Wait Until 实现,例如,上述程序的功能与以下程序相同。
IF sem Pers = FALSE THEN
sem Pers := TRUE ;
ELSE
Wait Until sem Pers = FALSE ;
sem Pers:= TRUE ;
ENDIF
了解更多库卡机器人知识欢迎点击咨询:库卡机器人集成
- 下一篇:库卡机器人的程序停止指令
- 上一篇:库卡机器人集成|介绍什么是程序点偏置与镜像函数