
 ІъЖ·:99
ІъЖ·:99
 БӘПөОТГЗ
БӘПөОТГЗ

ЎЎЎЎ1.ЦёБоУл№ҰДЬ
ЎЎЎЎPAPID іМРтЖ«ТЖЙъР§ЎўіМРтЖ«ТЖЙи¶ЁЦёБоҝЙХыМеёДұдіМРтЦРЛщУРіМРтөгөДО»ЦГЈ¬»ъЖчИЛәННвІҝЦбөДЖ«ТЖҝЙ·ЦұрЦёБоЈ¬ЦёБоөДГыіЖУлұаіМёсКҪјыұн 3.6-1ЎЈ
ЎЎ

ЎЎ
ЎЎЎЎіМРтЖ«ТЖЙъР§ЎўіМРтЖ«ТЖЙи¶ЁЦёБоөД№ҰДЬАаЛЖУЪ№ӨјюЧшұкПөЙи¶ЁЈ¬өұ»ъЖчИЛЖ«ТЖЙъР§КұЈ¬ҝЙК№ЛщУРіМРтөгөДXYZЧшұкЎў№ӨҫЯЧЛМ¬ҫщІъЙъХыМеЖ«ТЖЈ»НвІҝЦбЖ«ТЖЙъР§КұЈ¬ФтҝЙК№ЛщУРіМРтөгөДНвІҝЦбО»ЦГІъЙъХыМеЖ«ТЖЎЈ
ЎЎЎЎіМРтЖ«ТЖІ»ҪцҝЙёДұдНј 3.6-1ЈЁaЈ©ЛщКҫөД»ъЖчИЛXYZО»ЦГЈ¬¶шЗТ»№ҝЙМнјУ№ӨҫЯЧЛМ¬Ж«ТЖ№ҰДЬЈ¬К№ЧшұкПөІъЙъНј 3.6-1ЈЁbЈ©ЛщКҫөДРэЧӘЎЈіМРтЖ«ТЖНЁіЈУГАҙёДұд»ъЖчИЛөДЧчТөЗшЈ¬АэИзЈ¬өұ»ъЖчИЛРиТӘҪшРР¶а№ӨјюЧчТөКұЈ¬НЁ№э»ъЖчИЛЖ«ТЖЈ¬ұгҝЙАыУГН¬Т»іМРтНкіЙЧчТөЗш 1ЎўЧчТөЗш 2 өДПаН¬ЧчТөЎЈ
ЎЎЎЎ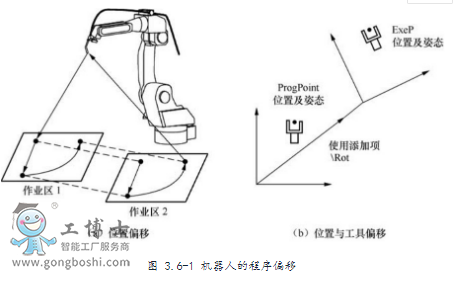
ЎЎЎЎ2.іМРтЖ«ТЖЙъР§Улі·Пъ
ЎЎЎЎФЪ RAPID іМРтЦРЈ¬»ъЖчИЛЎўНвІҝЦбөДіМРтЖ«ТЖҝЙ·ЦұрНЁ№э»ъЖчИЛіМРтЖ«ТЖЙъР§ЦёБо PDisp OnЎўНвІҝЦбіМРтЖ«ТЖЙъР§ЦёБо EOffs On АҙКөПЦЎЈ
ЎЎЎЎіМРтЖ«ТЖЙъР§ЦёБоөДЖ«ТЖБҝҝЙНЁ№эЦёБоЦРөДІОХХөгәНДҝұкөгЈ¬УЙПөНіЧФ¶ҜјЖЛгЙъіЙЈ»іМРтЖ«ТЖЙи¶ЁЦёБоҝЙЦұҪУ¶ЁТе»ъЖчИЛЎўНвІҝЦбөДіМРтЖ«ТЖБҝЈ¬ОЮРиЦё¶ЁІОХХөгәНДҝұкО»ЦГЎЈPDisp OnЎўEOffs On ЦёБоҝЙФЪіМРтЦРН¬КұК№УГЈ¬ЛщІъЙъөДЖ«ТЖБҝҝЙЧФ¶ҜөюјУЎЈ
ЎЎЎЎPDisp OnЎўEOffs On ЦёБоЛщІъЙъөДіМРтЖ«ТЖЈ¬ҝЙ·ЦұрНЁ№эЦёБо PDisp OffЎўEOffs Off і·ПъЈ¬»тАыУГәуКцөДіМРтЖ«ТЖБҝЗеіэәҜКэГьБо ORob T ЗеіэЈ»ҙЛНвЈ¬Из№ыіМРтЦРК№УГБЛәуКцөДіМРтЖ«ТЖЙи¶ЁЦёБо PDisp SetЎўEoffs SetЈ¬ТІҪ«Зеіэ PDisp OnЎўEOffs On ЦёБоөДіМРтЖ«ТЖЎЈ
ЎЎЎЎPDisp OnЎўEOffs On ЦёБоЦРөДМнјУПоЎўіМРтКэҫЭЧчУГИзПВЎЈ
ЎЎЎЎ\RotЈә№ӨҫЯЖ«ТЖ№ҰДЬСЎФсЈ¬КэҫЭАаРН switchЎЈФцјУМнјУПо\RotЈ¬ҝЙК№»ъЖчИЛФЪXYZО»ЦГЖ«ТЖөДН¬КұЈ¬ёщҫЭДҝұкО»ЦГөчХы№ӨҫЯЧЛМ¬ЎЈ
ЎЎЎЎ\Exe PЈәіМРтЖ«ТЖДҝұкО»ЦГЈ¬КэҫЭАаРН robtargetЎЈЛьУГАҙ¶ЁТеІОХХөг Prog Point ҫӯіМРтЖ«ТЖәуөДДҝұкО»ЦГЈ»ИзІ»К№УГМнјУПо\Exe PЈ¬ФтТФөұЗ°О»ЦГЈЁНЈЦ№өг fineЈ©ЧчОӘіМРтЖ«ТЖДҝұкЎЈ
ЎЎЎЎProg PointЈәіМРтЖ«ТЖІОХХөгЈ¬КэҫЭАаРН robtargetЎЈІОХХөгКЗУГАҙјЖЛг»ъЖчИЛЎўНвІҝЦбіМРтЖ«ТЖБҝөД»щЧјО»ЦГЈ¬ДҝұкО»ЦГУлІОХХөгөДІоЦөҫНКЗіМРтЖ«ТЖБҝЎЈ
ЎЎЎЎToolЈә№ӨҫЯКэҫЭЈ¬КэҫЭАаРН tooldataЎЈЦё¶ЁіМРтЖ«ТЖЛщ¶ФУҰөД№ӨҫЯЎЈ
ЎЎЎЎ\WObjЈә№ӨјюКэҫЭЈ¬КэҫЭАаРН wobjdataЎЈФцјУМнјУПоәуЈ¬іМРтКэҫЭ Prog PointЎў\Exe P ОӘ№ӨјюЧшұкПөКэҫЭЈ»·сФтЈ¬ОӘҙуөШЧшұкПөКэҫЭЎЈ
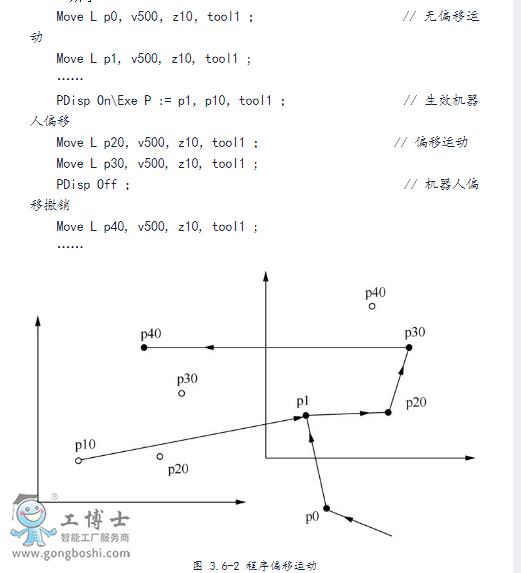
ЎЎЎЎ»ъЖчИЛіМРтЖ«ТЖЙъР§/і·ПъЦёБоөДұаіМКөАэИзПВЈ¬іМРтөДТЖ¶Ҝ№мјЈИзНј 3.6-2 ЛщКҫЎЈ
ЎЎЎЎMove L p0Ј¬ v500Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// ОЮЖ«ТЖФЛ¶Ҝ
ЎЎЎЎMove L p1, v500, z10, tool1 ;
ЎЎЎЎ……
ЎЎЎЎPDisp On\Exe P := p1Ј¬ p10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// ЙъР§»ъЖчИЛЖ«ТЖ
ЎЎЎЎMove L p20Ј¬ v500Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // Ж«ТЖФЛ¶Ҝ
ЎЎЎЎMove L p30, v500, z10, tool1 ;
ЎЎЎЎPDisp Off Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // »ъЖчИЛЖ«ТЖі·Пъ
ЎЎЎЎMove L p40, v500, z10, tool1 ;
ЎЎЎЎ……
ЎЎЎЎНвІҝЦбіМРтЖ«ТЖҪцУГУЪЕдЦГУРНвІҝЦбөД»ъЖчИЛПөНіЈ¬ЦёБоөДұаіМКөАэИзПВЎЈ
ЎЎЎЎMove L p1Ј¬ v500Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// ОЮЖ«ТЖФЛ¶Ҝ
ЎЎЎЎEOffs On \Exe P := p1Ј¬ p10 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// НвІҝЦбіМРтЖ«ТЖЙъР§
ЎЎЎЎMove L p20, v500, z10, tool1 ;
ЎЎЎЎ……
ЎЎЎЎEOffs Off Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // НвІҝЦбЖ«ТЖі·Пъ
ЎЎЎЎИз»ъЖчИЛөұЗ°О»ЦГКЗТФНЈЦ№өгЈЁfineЈ©РОКҪЦё¶ЁөДЧјИ·О»ЦГЈ¬ФтёГөгҝЙЦұҪУЧчОӘіМРтЖ«ТЖөДДҝұкО»ЦГЈ¬ҙЛКұЈ¬ЦёБоЦРОЮРиК№УГМнјУПо\Exe PЈ¬АэИзЈә
ЎЎЎЎMove J p1Ј¬ v500Ј¬ fine \Inpos := inpos50Ј¬ tool1 Ј»// НЈЦ№өг¶ЁО»
ЎЎЎЎPDisp On p10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// »ъЖчИЛЖ«ТЖЈ¬Дҝұкөг P1
ЎЎЎЎ……
ЎЎЎЎMove J p2Ј¬ v500Ј¬ fine \Inpos := inpos50Ј¬ tool1 Ј»// НЈЦ№өг¶ЁО»
ЎЎЎЎEOffs On p20 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// НвІҝЦбЖ«ТЖЈ¬Дҝұкөг P2
ЎЎЎЎ……
ЎЎЎЎ»ъЖчИЛіМРтЖ«ТЖЦёБо»№ҝЙҪбәПЧУіМРтөчУГК№УГЈ¬К№іМРтөДФЛ¶Ҝ№мјЈХыМеЖ«ТЖЈ¬ТФҙпөҪёДұдЧчТөЗшУтөДДҝөДЎЈАэИзЈ¬КөПЦНј 3.6-3 ЛщКҫ 3 ёцЧчТөЗшұд»»өДіМРтИзПВЎЈ
ЎЎЎЎ
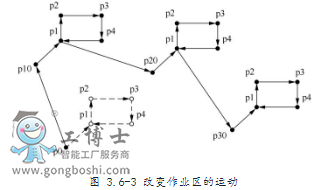
ЎЎЎЎMove J p10Ј¬ v1000Ј¬ fine\Inpos := inpos50Ј¬ tool1 Ј»// өЪ 1 Ж«ТЖДҝұкөг¶ЁО»
ЎЎЎЎdraw_square Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// өчУГЧУіМРт№мјЈ
ЎЎЎЎMove J p20Ј¬ v1000Ј¬ fine \Inpos := inpos50Ј¬ tool1 Ј»// өЪ 2 Ж«ТЖДҝұкөг¶ЁО»
ЎЎЎЎdraw_square Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// өчУГЧУіМРт№мјЈ
ЎЎЎЎMove J p30Ј¬ v1000Ј¬ fine \Inpos := inpos50Ј¬ tool1 Ј»// өЪ 3 Ж«ТЖДҝұкөг¶ЁО»
ЎЎЎЎdraw_square Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// өчУГЧУіМРт№мјЈ
ЎЎЎЎ……
ЎЎЎЎ!*************************************
ЎЎЎЎPROC draw_squareЈЁЈ©
ЎЎЎЎPDisp On p0Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎ // ЙъР§іМРтЖ«ТЖЈ¬ІОХХөг p0ЎўДҝұкөгОӘөұЗ°О»ЦГ
ЎЎЎЎMove J p1Ј¬ v1000Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// РиТӘЖ«ТЖөД№мјЈ
ЎЎЎЎMove L p2, v500, z10, tool1 ;
ЎЎЎЎMove L p3, v500, z10, tool1 ;
ЎЎЎЎMove L p4, v500, z10, tool1 ;
ЎЎЎЎMove L p1, v500, z10, tool1 ;
ЎЎЎЎPDisp Off Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // іМРтЖ«ТЖі·Пъ
ЎЎЎЎENDPROC
ЎЎЎЎ!*************************************
ЎЎЎЎ3.іМРтЖ«ТЖЙи¶ЁУлі·Пъ
ЎЎЎЎФЪ RAPID іМРтЦРЈ¬»ъЖчИЛЎўНвІҝЦбөДіМРтЖ«ТЖТІҝЙНЁ№э»ъЖчИЛЎўНвІҝЦбіМРтЖ«ТЖЙи¶ЁЦёБоАҙКөПЦЎЈPDisp SetЎўEOffs Set ЦёБоҝЙЦұҪУ¶ЁТе»ъЖчИЛЎўНвІҝЦбөДіМРтЖ«ТЖБҝЈ¬¶шОЮРиАыУГІОХХөгәНДҝұкО»ЦГјЖЛгЖ«ТЖБҝЈ»ТтҙЛЈ¬¶ФУЪЦ»РиТӘҪшРРЧшұкЦбЖ«ТЖөДЧчТөЈЁИз°бФЛЎў¶С¶вөИЈ©Ј¬ҝЙАыУГЦёБоКөПЦО»ЦГЖҪТЖЈ¬ТФјт»ҜұаіМУлІЩЧчЎЈ
ЎЎЎЎЦёБо PDispSetЎўEOffsSet ЛщЙъіЙөДіМРтЖ«ТЖЈ¬ҝЙ·ЦұрНЁ№эЖ«ТЖі·ПъЦёБо PDispOffЎўEOffsOff і·ПъЈ¬»тАыУГіМРтЖ«ТЖЦёБо PDisp OnЎўEOffs On ЗеіэЎЈҙЛНвЈ¬¶ФУЪН¬Т»іМРтөгЈ¬Ц»ДЬАыУГ PDispSetЎўEOffsSet ЦёБоЙи¶ЁТ»ёцЖ«ТЖБҝЈ¬¶шІ»ДЬНЁ№эЦёБоөДЦШёҙК№УГөюјУЖ«ТЖЎЈ
ЎЎЎЎ»ъЖчИЛЎўНвІҝЦбіМРтЖ«ТЖЙи¶ЁЦёБоөДіМРтКэҫЭә¬ТеИзПВЎЈ
ЎЎЎЎDispFrame Јә»ъЖчИЛіМРтЖ«ТЖБҝЈ¬КэҫЭАаРН poseЎЈ»ъЖчИЛөДіМРтЖ«ТЖБҝРиТӘНЁ№эЧшұкПөЧЛМ¬КэҫЭ pose ¶ЁТеЈ¬pose КэҫЭЦРөДО»ЦГКэҫЭПо pos УГАҙЦё¶ЁЧшұкФӯөгөДЖ«ТЖБҝЈ»·ҪО»КэҫЭПо orient УГАҙЦё¶ЁЧшұкПөРэЧӘөДЛДФӘКэЈ¬І»РиТӘРэЧӘЧшұкПөКұЈ¬orient ОӘ[1Ј¬0Ј¬0Ј¬0]ЎЈ
ЎЎЎЎEAx OffsЈәНвІҝЦбіМРтЖ«ТЖБҝЈ¬КэҫЭАаРН extjointЎЈЦұПЯЦбЖ«ТЖБҝөДөҘО»ОӘ mmЈ¬»ШЧӘЦбөДөҘО»ОӘ °ЎЈ
ЎЎЎЎ
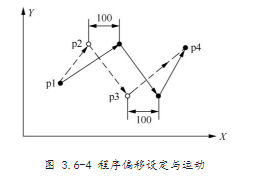
ЎЎЎЎ¶ФУЪНј 3.6-4 ЛщКҫөДјтөҘіМРтЖ«ТЖФЛ¶ҜЈ¬іМРтЖ«ТЖЙи¶Ё/і·ПъЦёБоөДұаіМКөАэИзПВЎЈ
ЎЎЎЎVAR pose xp100 := [ [100Ј¬ 0Ј¬ 0]Ј¬ [1Ј¬ 0Ј¬ 0Ј¬ 0] ] Ј»ЎЎ// ¶ЁТеіМРтЖ«ТЖБҝX+100
ЎЎЎЎMove J p1Ј¬ v1000Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // ОЮЖ«ТЖФЛ¶Ҝ
ЎЎЎЎ……
ЎЎЎЎPDisp Set xp100 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // іМРтЖ«ТЖЙъР§
ЎЎЎЎMove L p2Ј¬ v500Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// Ж«ТЖФЛ¶Ҝ
ЎЎЎЎMove L p3, v500, z10, tool1 ;
ЎЎЎЎPDisp Off Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // іМРтЖ«ТЖі·Пъ
ЎЎЎЎMove J p4Ј¬ v1000Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // ОЮЖ«ТЖФЛ¶Ҝ
ЎЎЎЎ……
ЎЎЎЎНвІҝЦбіМРтЖ«ТЖЙи¶ЁҪцУГУЪЕдЦГУРНвІҝЦбөД»ъЖчИЛПөНіЈ¬ЦёБоөДұаіМКөАэИзПВЎЈ
ЎЎЎЎVAR extjoint eax_p100 := [100Ј¬ 0Ј¬ 0Ј¬ 0Ј¬ 0Ј¬ 0] Ј»ЎЎЎЎ// ¶ЁТеНвІҝЦбЖ«ТЖБҝ e1+100
ЎЎЎЎMove J p1Ј¬ v1000Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // ОЮЖ«ТЖФЛ¶Ҝ
ЎЎЎЎ……
ЎЎЎЎEOffs Set eax_p100 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// іМРтЖ«ТЖЙъР§
ЎЎЎЎMove L p2Ј¬ v500Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ// Ж«ТЖФЛ¶Ҝ
ЎЎЎЎEOffs Off Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // іМРтЖ«ТЖі·Пъ
ЎЎЎЎMove J p3Ј¬ v1000Ј¬ z10Ј¬ tool1 Ј»ЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎЎ // ОЮЖ«ТЖФЛ¶Ҝ
БЛҪвёь¶аҝвҝЁ»ъЖчИЛЦӘК¶»¶Уӯөг»чЧЙСҜЈәҝвҝЁ»ъЖчИЛјҜіЙ
- ПВТ»ЖӘЈәҝвҝЁ»ъЖчИЛјҜіЙ|ҪйЙЬКІГҙКЗіМРтөгЖ«ЦГУлҫөПсәҜКэ
- ЙПТ»ЖӘЈә№ӨТө»ъЖчИЛөДМШөг