
 产品:99
产品:99
 联系我们
联系我们

工业机器人的组成
工业机器人是一种功能完整,可独立运行的典型机电一体化设备,主要组成为控制器,驱动系统和操作界面,可进行手动、自动操作和编程,通过自身的控制能力来实现相应的功能。广义上的工业机器人如下图,总体上可以分为机械部分和电器控制系统两大部分。
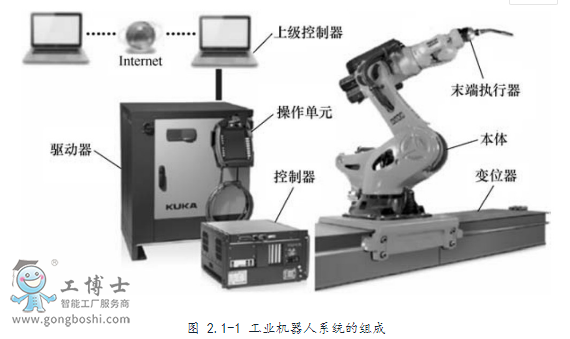
工业机器人(以下简称「机器人J)系统的机械部件包括机器人本体、末端执行器、变位器等;控制系统主要包括控制器、驱动器、操作单元、上级控制器等。其中,机器人本体、末端执行器以及控制器、驱动器、操作单元是机器人必需的基本组成部件,所有机器人都必须配备。

1.末端执行器又称工具,它是机器人的作业机构,与作业对象和要求有关,其种类繁多,一般需要由机器人制造厂和用户共同设计、制造与集成。变位器是用于机器人或工件的整体移动或进行系统协同作业的附加装置,它可根据需要选配。
在控制系统中,上级控制器是用于机器人系统协同控制、管理的附加设备,既可用于机器人与机器人、机器人与变位器的协同作业控制,也可用于机器人和数控机床、机器人和自动生产线其他机电—体化设备的集中控制,此外,还可用于机器人的操作、编程与调试。上级控制器同样可根据实际系统的需要选配,在柔性加工单元(FMC)、自动生产线等自动化设备上,上级控制器的功能也可直接由数控机床所配套的计算机数控系统、生产线控制用的可编程控制器(PLC)等承担。
2机器人本体
机器人本体又称操作机,它是用来完成各种作业的执行机构,包括机械部件及安装在机械部件上的驱动电动机、传感器等。
机器人本体的形态各异,但绝大多数都是由若干关节(Joint)和连杆(Link
机器人的手部用来安装末端执行器,它既可以安装类似人类的手爪,也可以安装吸盘或其他各种作业工具;腕部用来连接手部和手臂,起到支撑手部的作用;上臂用来连接腕部和下臂。上臂可回绕下臂摆动,实现手腕大范围的上下(俯仰)运动;下臂用来连接上臂和腰部,并可回绕腰部摆动,以实现手腕大范围的前后运动﹔腰部用来连接下臂和基座,它可以在基座上回转,以改变整个机器人的作业方向;基座是整个机器人的支持部分。机器人的基座、腰、下臂、上臂通称机身﹔机器人的腕部和手部通称手腕。
机器人的末端执行器又称工具,它是安装在机器人手腕上的作业机构。末端执行器与机器人的作业要求、作业对象密切相关,一般需要由机器人制造厂和用户共同设计与制造。例如,用于装配、搬运、包装的机器人则需要配置吸盘、手爪等用来抓取零件、物品的夹持器;而加工类机器人需要配置用于焊接、切割、打磨等加工的焊枪、割枪、铣头、磨头等各种工具或刀具等。
3.变位器
变位器是工业机器人的主要配套附件,其作用和功能如图2.1-3所示。通过变位器,可增加机器人的自由度、扩大作业空间、提高作业效率,实现作业对象或多机器人的协同运动,提升机器人系统的整体性能和自动化程度。
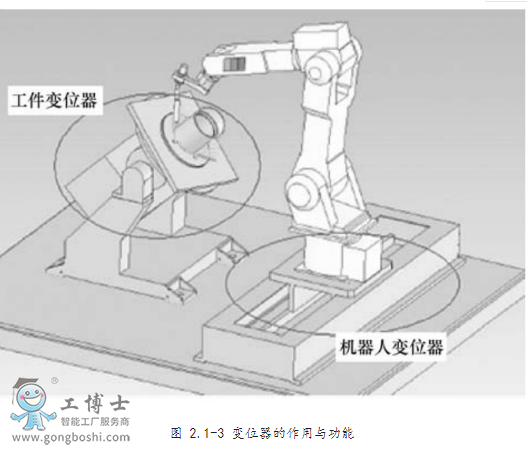
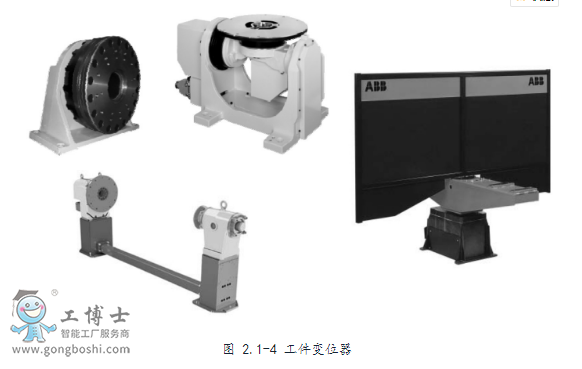
在结构上,工件变位器以回转变位器居多。通过工件的回转,可在机器人位置保持不变的情况下改变工件的作业面,以完成工件的多面作业,避免多次装夹。此外,还可通过工装的 180°整体回转运动,实现作业区与装卸区的工件自动交换,使工件的装卸和作业可同时进行,从而大大缩短工件装卸时间。
机器人变位器有图2.1-5所示的回转变位器与直线变位器两类。回转变位器主要用于大型、重型机器人的360°回转变位,例如,取代4、5轴垂直串联机器人本体的腰回转轴,以简化机器人的本体结构、增强结构刚度。直线变位器主要用于机器人的大范围整体运动,以扩大机器人的作业范围,实现大型工件、多工件的作业;或者,通过机器人的运动,实现作业区与装卸区的交换,以缩短工件装卸时间,提高机器人的作业效率。
2.1-5机器人变位器
工件变位器、机器人变位器既可选配机器人生产厂家的标准部件,也可根据用户需要设计、制作。简单机器人系统的变位器一般由机器人控制器直接控制,多机器人复杂系统的变位器需要由上级控制器进行集中控制。
4电气控制系统
在机器人电气控制系统中,上级控制器仅用于复杂系统各种机电一体化设备的协同控制、运行管理和调试编程,它通常以网络通信的形式与机器人控制器进行信息交换,因此实际上属于机器人电气控制系统的外部设备﹔而机器人控制器、操作单元、伺服驱动器及辅助控制电路,则是机器人控制必不可少的系统部件。
( 1)机器人控制器
机器人控制器是用于机器人坐标轴位置和运动轨迹控制的装置,输出运动轴的插补脉冲,其功能与数控装置非常类似,控制器的常用结构有工业计算机型(PC机型)和可编程控制器(PLC)型2种。
工业计算机型机器人控制器的主机和通用计算机并无本质的区别,但机器人控制器需要增加传感器、驱动器接口等硬件,这种控制器的兼容性好、软件安装方便、网络通信容易。PLC型控制器以类似PLC的CPU模块作为中央处理器,然后通过选配各种 PLC功能模块(如测量模块、轴控制模块等)来实现对机器人的控制,这种控制器的配置灵活,模块通用性好,可靠性高。
(2)操作单元
工业机器人的现场编程一般通过示教操作来实现,它对操作单元的移动性能和手动性能的要求较高,但其显示功能一般不及计算机数控系统,因此,机器人的操作单元以手持式为主,习惯上称之为示教器。
传统的示教器由显示器和按键组成,操作者可通过按键直接输入命令和进行所需的操作。目前常用的示教器为菜单式,它由显示器和操作菜单键组成,操作者可通过操作菜单选择需要的操作。先进的示教器使用了与目前智能手机相同的触摸屏和图标界面,这种示教器的***大优点是可直接通过wi-Fi连接控制器和网络,从而省略了示教器和控制器间的连接电缆﹔智能手机型操作单元使用灵活、方便,是适合网络环境下使用的新型操作单元。
(3)驱动器
驱动器实际上是用于控制器的插补脉冲功率放大的装置,实现驱动电动机位置、速度、转矩控制,驱动器通常安装在控制柜内。驱动器的形式取决于驱动电动机的类型,伺服电动机需要配套伺服驱动器,步进电动机则需要使用步进驱动器。机器人目前常用的驱动器以交流伺服驱动器为主,它有集成式、模块式和独立型3种基本结构形式。
集成式驱动器的全部驱动模块集成一体,电源模块可以独立或集成,这种驱动器的结构紧凑、生产成本低,是目前使用较为广泛的结构形式。模块式驱动器的电源模块为公用,驱动模块独立,驱动器需要统一安装。集成式、模块式驱动器不同控制轴间的关联性强,调试、维修和更换相对比较麻烦。独立型驱动器的电源和驱动电路集成一体,每一轴的驱动器可独立安装和使用,因此,其安装使用灵活、通用性好,调试、维修和更换也较方便。
( 4)辅助控制电路
辅助控制电路主要用于控制器、驱动器电源的通断控制和接口信号的转换。由于工业机器人的控制要求类似,接口信号的类型基本统一,为了缩小体积、降低成本、方便安装,辅助控制电路常被制成标准的控制模块。

尽管机器人的用途、规格有所不同,但电气控制系统的组成部件和功能类似,因此,机器人生产厂家一般将电气控制系统统一设计成图 2.1-6所示的控制箱型或控制柜型。在以上的控制箱、控制柜中,示教器是用于工业机器人操作、编程及数据输入/显示的人机界面,为了方便使用,一般为可移动式悬挂部件﹔驱动器一般为集成式交流伺服驱动器;控制器则以PLC型为主。另外,在采用工业计算机型机器人控制器的系统中,控制器有时也可独立安装,系统的其他控制部件通常统一安装在控制柜内。
了解更多库卡机器人知识欢迎点击咨询:库卡机器人集成