
 产品:99
产品:99
 联系我们
联系我们

库卡坐标偏移编程
机器人工程师很多时候需要用到偏移,坐标偏移或工具偏移,下面给你讲解库卡机器人具体偏移编程。
一.概要:
已使用过库卡机器人的老铁们,应该知道要表示一个机器人的直角坐标系的位置会用到FRAME
-X/Y/Z:表示直角坐标系直线坐标;
-A/B/C: 表示直角坐标系旋转坐标;
-S/T : 表示机器人的状态与转角;
-E1..E6:表示外部轴的角度;
库卡的欧拉角Euler-A-B-C对应的是Z->Y->X;
二.欧拉角说明:
1.库卡机器人坐标转换的遵循的准则:
- ***步:X/Y/Z变换(顺序无关);
- 第二步:A/B/C变换(先A,再B,***后C);
2.案例:
-绕X转90°,再绕Y转90°,***后绕Z转90°:
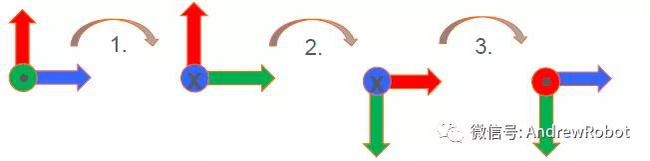
-绕Y转90°,再绕X转90°,***后绕Z转90°:

三.几何运算符:
用几何运算符可以以几何方式相加位置。几何相加也被称之为“Frame
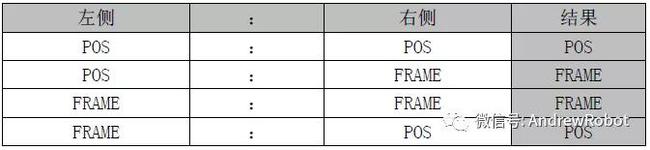
1.适用数据类型:FRAME
2.两个运算数的运算:
3.三个运算数的运算:

四.应用场景:
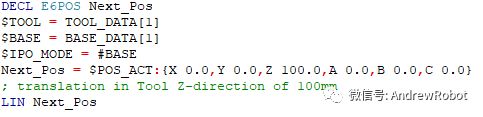
1.机器人基于当前位置沿工具Z向移动100mm:
- 传统: LIN_REL {Z 100} #TOOL
-几何运算符:
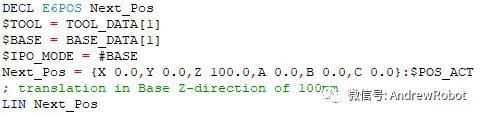
2.机器人基于当前位置沿基座标Z向移动100mm:
-传统: LIN_REL {Z 100} #BASE
-几何运算符:
注意:不推荐使用相对运动指令;
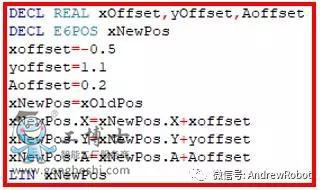
3.视觉相机知会机器人应该沿着基座标X方向偏-0.5,沿着Y方向偏移1.1,沿着A方向旋转0.2,由于视觉每一次修正值不一定一样,常规做法:
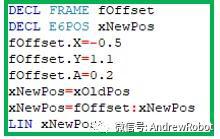
好的做法是用几何运算符:
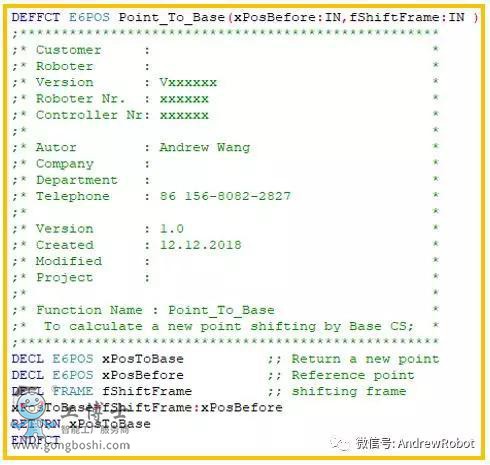
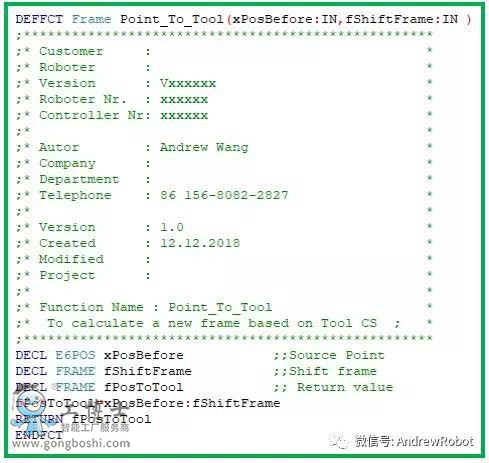
五.扩展(偏移功能)
- 下一篇:库卡机器人集成|铝合金去毛刺浮动主轴
- 上一篇:库卡机器人集成|库卡机器人的应用领域